Este tipo de transmisión se llama transmisión de señal y el otro es el regreso. Este tipo de transmisión se llama transmisión de señal diferencial o balanceada.
La señal que se propaga a lo largo del cable se mide como la diferencia de potencial entre los dos cables. Las corrientes que fluyen en direcciones opuestas por un par de cable balanceados se les llaman corriente de circuito metálico.
Las corrientes que fluyen en las mismas direcciones se le llama corriente longitudinales. Un par de cables balanceados tiene la ventaja que la mayoría de la interferencia por ruido (voltaje de modo común) se induce igual mente en ambos cables, produciendo corrientes longitudinales que se cancelan en las carga.
Cualquier par de cable puede operar en el modo balanceado siempre y cuando ninguno de los dos cables esté con el potencial a tierra. Esto incluye al cable coaxial que tiene dos conductores centrales y una cubierta metálica.
La cubierta metálica general mente se conecta a tierra para evitar interferencia estática al penetrar a los conductores centrales. Con una línea de transmisión desbalanceada, un cable se encuentra en el potencial de tierra, mientras que el otro cable se encuentra en el potencial de la señal.
Este tipo de transmisión se le llama transmisión de señal desbalanceada o de terminación sencilla. Con la transmisión de una señal desbalanceada, el cable de la tierra también puede ser la referencia a otros cables que llevan señales.
MODOS TRANSMISION
COAXIAL:
Este tipo de cable esta compuesto de un hilo conductor central de cobre rodeado por una malla de hilos de cobre. El espacio entre el hilo y la malla lo ocupa un conducto de plástico que separa los dos conductores y mantiene las propiedades eléctricas. Todo el cable está cubierto por un aislamiento de protección para reducir las emisiones eléctricas. El ejemplo más común de este tipo de cables es el coaxial de televisión.

Originalmente fue el cable más utilizado en las redes locales debido a su alta capacidad y resistencia a las interferencias, pero en la actualidad su uso está en declive. Su mayor defecto es su grosor, el cual limita su utilización en pequeños conductos eléctricos y en ángulos muy agudos.
MODELOS DE CABLES COAXIAL
Cable estándar Ethernet, de tipo especial conforme a las normas IEEE 802.3 10 BASE 5. Se denomina también cable coaxial “grueso”, y tiene una impedancia de 50 Ohmios. El conector que utiliza es del tipo “N”.
Cable coaxial Ethernet delgado, denominado también RG 58, con una impedancia de 50 Ohmios. El conector utilizado es del tipo BNC.
Cable coaxial del tipo RG 62, con una impedancia de 93 Ohmios. Es el cable estándar utilizado en la gama de equipos 3270 de IBM, y también en la red ARCNET. Usa un conector BNC.
Cable coaxial del tipo RG 59, con una impedancia de 75 Ohmios. Este tipo de cable lo utiliza, en versión doble, la red WANGNET, y dispone de conectores DNC y TNC
CABLES IMPEDANCIA
*IEEE802.3 10 BASE 2 50 OHMIOS
*RG 58 50 OHMIOS
*RG 62 93 OHMIOS
*RG 59 75 OHMIOS
PAR TRENZADO:
Es el tipo de cable más común y se originó como solución para conectar teléfonos, terminales y ordenadores sobre el mismo cableado. Cada cable de este tipo está compuesto por un serie de pares de cables trenzados. Los pares se trenzan para reducir la interferencia entre pares adyacentes. Normalmente una serie de pares se agrupan en una única funda de color codificado para reducir el número de cables físicos que se introducen en un conducto.
El número de pares por cable son 4, 25, 50, 100, 200 y 300. Cuando el número de pares es superior a 4 se habla de cables multipar.
TIPOS DE CABLE TRENZADO
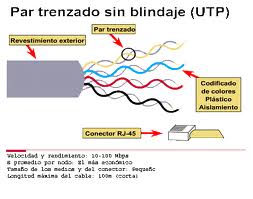
NO APANTALLADO (UTP): Es el cable de par trenzado normal y se le referencia por sus siglas en inglés UTP (Par Trenzado no Apantallado). Las mayores ventajas de este tipo de cable son su bajo costo y su facilidad de manejo. Sus mayores desventajas son su mayor tasa de error respecto a otros tipos de cable, así como sus limitaciones para trabajar a distancias elevadas sin regeneración.
Para las distintas tecnologías de red local, el cable de pares de cobre no apantallado se ha convertido en el sistema de cableado más ampliamente utilizado.
estándar EIA-568 en el adendum TSB-36 diferencia tres categorías distintas para este tipo de cables:
- Categoría 3: Admiten frecuencias de hasta 16 Mhz y se suelen usar en redes IEEE 802.3 10BASE-T y 802.5 a 4 Mbps
- Categoría 4: Admiten frecuencias de hasta 20 Mhz y se usan en redes IEEE 802.5 Token Ring y Ethernet 10BASE-T para largas distancias
- . Categoría 5: Admiten frecuencias de hasta 100 Mhz y se usan para aplicaciones como TPDDI y FDDI entre otras.
Los cables de categoría 1 y 2 se utilizan para voz y transmisión de datos de baja capacidad (hasta 4Mbps). Este tipo de cable es el idóneo para las comunicaciones telefónicas, pero las velocidades requeridas hoy en día por las redes necesitan mejor calidad.
APANTALLADO (STP): Cada par se cubre con una malla metálica, de la misma forma que los cables coaxiales, y el conjunto de pares se recubre con una lámina apantallante. Se referencia con sus siglas en inglés STP (Shield Twiested Pair / Par Trenzado Apantallado).
La lamina apantallante reduce la tasa de error, pero incrementa el costo al requerirse un proceso de fabricación más costoso.
UNIFORME (FTP): Cada uno de los pares es trenzado uniformemente durante su creación. Esto elimina la mayoría de las interferencias entre cables y además protege al conjunto de los cables de interferencias exteriores. Se realiza un apantallamiento global de todos los pares mediante una lámina externa apantallante. Esta técnica permite tener características similares al cable apantallado con unos costes por metro ligeramente inferior. Este es usado dentro de la categoria 5 y 5e (Hasta 100 Mhz).


































